The Problem

Implantable neurostimulators have rapidly become established methods of treating a variety of neurological disorders. However, currently deployed medical devices of this kind are open-loop, meaning that they stimulate at a constant intensity regardless if there are any symptoms or not. Many of the existing shortcomings of deep brain stimulation come from the open-loop nature of the implanted devices. The vast majority of commercially available Deep Brain Stimulators are non-rechargeable and invasive surgery is required to replace the device (although not the electrodes in the brain) whenever the battery runs out. The battery’s lifespan is determined primarily by how often the device is used, and at what level of stimulation. Without being able to directly sense the onset and level of the tremor (and take appropriate action), deep brain stimulators are set to continually stimulate the patient. This reduces the battery life, and may cause undesired side effects due to unnecessary stimulation.
Our Solution
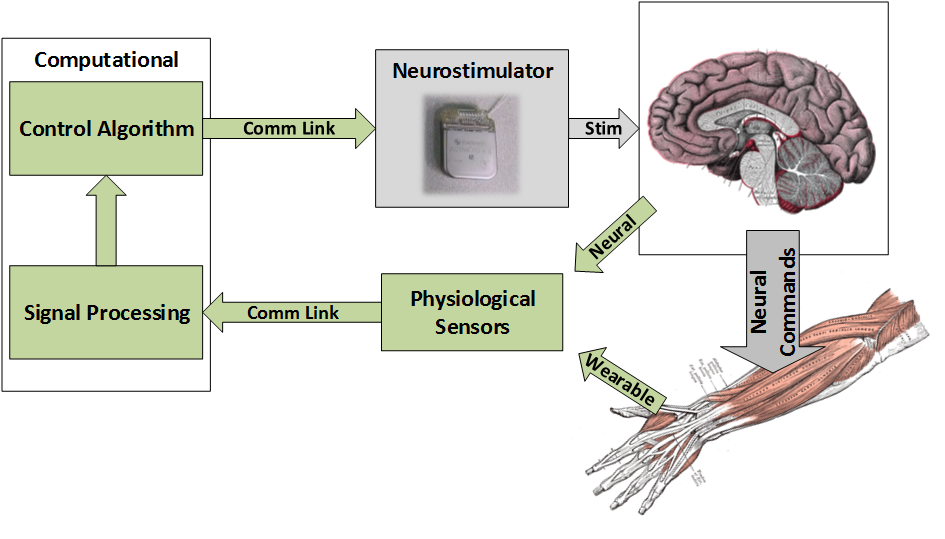
Closing the loop through sensors and real-time communication to the implanted neurostimulator could result in lower average power dissipation and reduced side effects from unneeded stimulation. Researchers in the BioRobotics Lab are currently working on a closed-loop DBS platform for investigating control strategies for the management of essential tremor. We have demonstrated systems capable using a variety of sensors including inertial measurements, electromyography and neurostimulator electrode readings. This sensed data is used to modify stimulation (within limits pre-set by a clinician), thus resulting in a closed-loop system.
Impact
The mobile closed-loop neurostimulation systems using wearable sensors that communicate between smartphones and implanted devices we are developing will provide a platform for investigations into the performance and viability of closed-loop DBS as a clinical tool. These mobile systems will be instrumental in expanding the understanding of the neurological basis of tremor by providing consistent data collection and patient monitoring. As we move forward with these closed-loop DBS systems, we hope to improve patient care by lowering exposure to side effects as well as increasing the battery life of implanted devices.
Affiliated Students and Faculty: Jeffrey Herron, Andrew Haddock, Brady Houston, Margaret Thompson, Tim Brown, Howard Chizeck
Related Media:
Publications:
Funding Sources:


